 �ھ��ͷ�
�ھ��ͷ� �ſͷ�
�ſͷ�














��ԃ�Ԓ
021-80392549


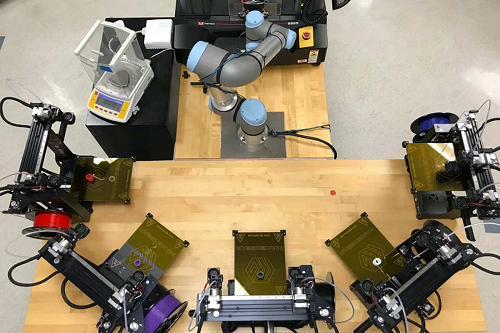
4��1����Ϣ��ӛ�ߏ��п�Ժ�پW(w��ng)�˽�����գ��Ї��ƌW(xu��)Ժ�������M(j��n)���g(sh��)�о�Ժ���������ܷ������ĈF(tu��n)�(du��)���͙C(j��)�����о���ȡ���M(j��n)չ��ᘌ���ͬ�ň��¶������(q��)��ܛ�w�͙C(j��)���˽�����ͬ�ň����y�Ԫ�(d��)�����ƵĆ��}���F(tu��n)�(du��)���һ�N��ȫ����Ķ���(q��)��ܛ�w�͙C(j��)���˪�(d��)�����Ʋ��ԣ��״Ό�(sh��)�F(xi��n)4������ܛ�w�͙C(j��)���˵Ī�(d��)��λ�ÿ��ƺ�3������ܛ�w�͙C(j��)���˵Ī�(d��)��·�����S���ơ�
�F(xi��n)4������ܛ�w�͙C(j��)���˪�(d��)��λ�ÿ���")
��(j��)Ϥ�����P(gu��n)�ɹ��l(f��)���ڙC(j��)�����I(l��ng)���ڿ�IEEE Transactions onRobotics�ϡ�
��(j��)��B�������͙C(j��)���˿Ʌf(xi��)ͬ��(zh��)�Џ�(f��)�s���΄�(w��)���Ķ�����ϵ�y(t��ng)����Ⱥ͔U(ku��)չ�ԣ�����΄�(w��)��(zh��)��Ч�ʡ�Ȼ����(d��)�����ƶ��������ň��(q��)�ӵ��͙C(j��)���˾�������(zh��n)����?y��n)�ȫ�ִň��еĶ����͙C(j��)�����ܵ��Ĵň���̖����ͬ�ģ��y�Ԍ�(sh��)�F(xi��n)�x���Եت�(d��)���(q��)�Ӷ����͙C(j��)�����е�ijһ����
ԓ�о����һ�N�·f�Ķ������(q��)���͙C(j��)������ȫ����Ī�(d��)�����Ʋ��ԣ��Ɍ�(sh��)�F(xi��n)��(d��)������4���͙C(j��)���˷քeȥ����ͬĿ��(bi��o)λ�ã��Լ�����3���͙C(j��)���˷քe��ۙ��ͬ�ą���·����
���ȣ��O(sh��)Ӌ(j��)��һ�N����ܛ�w�C(j��)���ˣ��ɱ������ʎ�ň��(q��)�ӣ�����ƽ�����M(j��n)�������\(y��n)�ӡ���Σ��O(sh��)Ӌ(j��)��������һϵ�о�����ͬ���Π�Ż�����ͬ�Į���(g��u)ܛ�w�͙C(j��)���ˣ��@Щ��ͬ�Ż������ܛ�w�͙C(j��)���ˌ���ʎ�ň����ٶ�푑�(y��ng)������ͬ������λ��ͬ��Ȼ���ڮ���(g��u)�C(j��)���˵��ٶ�푑�(y��ng)ģ�ͣ��O(sh��)Ӌ(j��)���(y��u)��(d��)���(q��)�ӿ����㷨����ᘌ��C(j��)����Ⱥ�������ٶȾ��Ӌ(j��)�������(y��ng)���(y��u)�(q��)�Ӵň����ԣ���(sh��)�F(xi��n)���x���һ���C(j��)�����ٶȷ��㣬�����Ľ��ƞ��㡣
���漰��(sh��)�(y��n)�(y��n)�C�˶������(q��)���͙C(j��)������ȫ����Ī�(d��)�����Ʋ��ԡ���(sh��)�(y��n)�Y(ji��)��������2��4������(g��u)ܛ�w�͙C(j��)���˵���ȫ���(d��)�������ǿ��еģ��Ү�(d��ng)�C(j��)���˔�(sh��)���������ӕr�����ܴ��ڲ��B(t��i)����(w��n)�����ٶ���ϵ���r����ͨ�^�������Ƶõ���(y��u)������(sh��)�(y��n)�в����˻���ҕ�X���ŷ����Ʒ�������(sh��)�F(xi��n)�����4���͙C(j��)���˵�λ�ÿ��ƺ�3�����יC(j��)���˵�·����ۙ���ƣ������`��С�����w�L�ȵ�����֮һ��
���⣬�о�߀ӑՓ�����ɱ���(d��)�����Ƶ��͙C(j��)���˔�(sh��)����̽ӑ���������(sh��)�����ܵķ�����
|

|

|

|
�j(lu��)��ȫ�O(ji��n)��")

����")
�j(lu��)110��(b��o)������(w��)")
